That is what you get around here if the Rafale is somehow introduced into a discussion. For an especially nutty trip down the rabbit hole try to figure out why it is that the Rafale is credited with absolutely endless electronic tricks that no other 4th generation, let alone 5th generation aircraft can call upon…
Rafale is a great jet, no doubt about it. But as far as the EWS goes it only offers one benifit over the legacy EWS39 and that is a rear AESA-transmitter.
Go reread the quotes I provided earlier in this thread. We are most certainly not just talking about “takeoff speed + 100kmph.”
We can do the calculations if you want.
F35 has higher drag than most others in “light” config as in 4-6 AAM.
F35 has lower thrust/weight ratio than most others in light config.
This must mean it has inferior acceleration. The only way this can be wrong is if the laws of physics dont apply to the F35.
Why would a fighter operate below corner speed ?
Because that might, in theory, make the chart look a little better for the F35?
I wonder how many in this thread smoke pot before posting. There are some very interesting posts coming here about light being slowed down, drfm being the same as active cancellation and faster than light speed fiber optics.
Oh, and I almost forgot the importance of fast acceleration from takeoff speed to takeoff speed + 100kmph.
Its fascinating stuff and I have my popcorn ready.
The problem is that if you take say first 5 seconds from that chart, then the F-35 indeed is not that far off the F-22A or F-16C (as a matter of fact, no aircraft is). Technically, if someone says that the F-35 accelerates at subsonic speeds almost like an F-16C, then he is not lying, just misleading..
I know, i know. But if we talk general subsonic performance, as most of us do…
And if we want to discouss drag then speed is an absolute must in that equation. Without speed there is no drag or friction, just a static position with no forces in any direction apart from gravity and ground resistance.
The original statement from Flynn was that the F-35 could match a Typhoon in transonic acceleration. The usual kiddies here pitched a fit calling the F-35 fat, slow, a pig, etc etc.
Now it has been confirmed that the F-35 does in fact match the Typhoon in transonic acceleration and the fools are trying to find some way to twist things so they don’t look quite so foolish.
Have you already forgotten this?
Its data from LM and they pretty much show that the F35 isnt designed to be fast.
But this is now revised to F35A 61 sec, F35C 0,8-1,2 108 sec +/-4 depending on interpretation of the report posted.
The F-35 does not have a “high drag” airframe by any means, but it is not the sort of pencil-thin airframe that would be better suited to very high speed flight. Operating at transonic speeds and below the F-35 is in fact a very low-drag aircraft. (in a combat configuration)
The following sort of speaks to the opposite:
1 The angles of the wings, fuselage cross section etc
2 The fuel efficiency (among the worst jets here) despite having one of the best/most efficient engines ever made in a fighter jet.
3 Speed and acceleration performance. Just look at the chart.
:confused: havenot heard about this , can you give some link ? , btw how good is the resolution of DAS , how sensitive it is compared to the IR sensor of EOTS , does the DAS sensor have more resolution , more sensitive than sensor on missile like aim-9x , mica ,or A2G missiles likeSLAM-ER , NSM ?
, i think about triangulation using DAS as there are more 1 IR sensor so it seem possible
There is one more option. If there are static sensors AND cameras that can zoom in and give better resolution.
The current 1 pixel per sqm at 691 meters range is not enough for passive ranging using trigonometry. Its WVR…
But if it uses an additional camera system that has higher zoom level and better resolution trigonometry will be enough.
i just think it not quite possible to make exactly model and RAM using :confused:
Yes, its hard to get exact figures, but the estimations that Sukhoi can do are probably very good.
but most of the time they be head or at the frontal arc on so i think it be more fair to use the head on RCS 🙂
Once again you are correct, but remember that there probably will be more than one active radar in the sky. If 2 squadrons meet and they use modern jets the following is likely.
1 They have AWACS support
2 They have datalinked data and sensor sharing and take turns in using onboard radar
3 The jet firing the missile doesnt have to be the one tracking the target
Against such asymmetric threat the average RCS is a more reliable figure to use. And all of these things have been demonstrated and have been used in operational jets for the last 10 years at least.
as far as i know the active cancellation based on destructive interference effect :confused: it doesnot really sound like what he say
No, its not how he explains it but there might be an active cancellation effect that occurs “accidentally” if one is using modern DRFM-techniques. I mean if you get the correct dopplereffect then the only thing missing is the phase shift. And the phase shift in the cm band can only be achieved accidentally or by luck.
BTW the F-35 have like 5- 6 DAS sensor and 1 EOTS , does that mean that it can do passive ranging using those sensor :confused: ( triangulation just like what RWR do to calculate the range to ground radar )
The passive ranging can come from basic trigonometric functions using sin/cos and tan.
no support for these 3 assumptions i afraid
and to be far head on RCS is more useful to see if one aircraft is more survivable for attack , i mean if you look at an aircraft directly 90 degree from top of it or strange behind then it will have huge RCS ( even for sth like B-2 , F-22 ) but in real life there be little or no situations when the enemy do that ( unless they are dogfight when stealth are no longer useful )
I dont know if i understand you correctly but I’ll answer it in a specified way to avoid misunderstandings.
1 The end result of 0,3-0,4sqm is probably a marketing thing, just like the 0,0001 sqm. I think both are at the far end.
2 There is extensive research on competing systems in all branches. Sukhoi, LM and Northrop are most likely no exeptions. All three firms have the capability do produce very high end stealth systems and currently the most advanced one (when it comes to RAM and materials) is the Pak FA. (Just read Jô Asakuras posts on the topic). If they can build things like the T50 and Su47 I am ready to bet my left testicle that they can to fairly accurate modelling of the F22.
3 Range: If the claim is somewhat correct (0,3-0,4sqm) then the Irbis will be able to track it from ~100nm.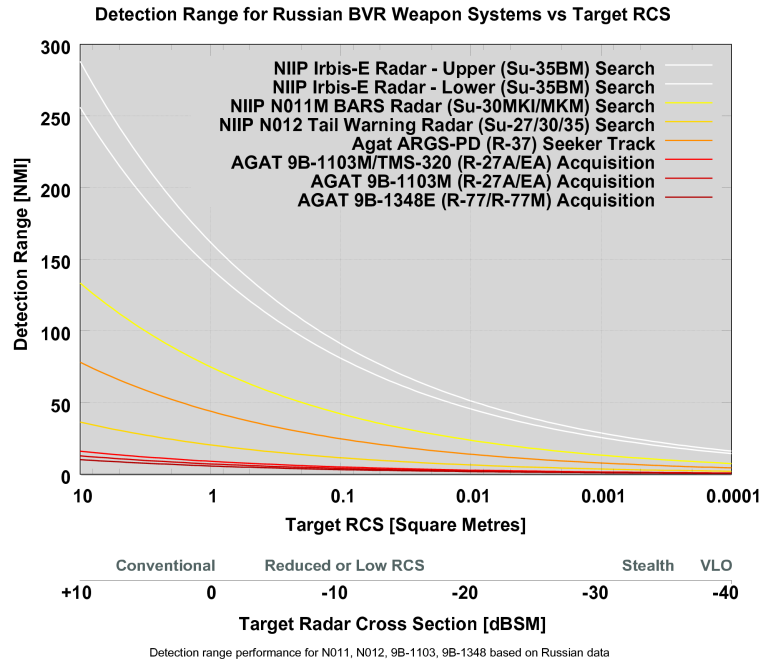
4 The way they calculate. Its my theory and when applied to older systems with known data (as presented) it is accurate. On the Su27 its the average frontal RCS in the +/- 60 degrees. I assume that they go for an average at the +/-45 degree frontal aspect, but I’m in no way considering it an absolute fact.
i havenot heard of any DRFM that can lower aircraft RCS , it will be useful if you can provide link for that , most DRFM sending false signals to make enemy radar believe there is many others targets either ahead or behind , slower or faster , have higher or lower RCS than the aircraft it self but it dont make the aircraft disappear , noise jamming by contrast overload the radar with it’s very strong signal so the aircraft disappear in the white screen
I think he is talking about an acive cancellation effect. In the x-band I can only see it happening by accident but in the VHF and Hf-band active cancellation might actually work.
Of course, best would be to have aircraft RCS from all 5 basic directions (frontal, side, rear, top, bottom) but for purposes of marketing, frontal RCS is used.
Couldn’t agree more, only its probably not the case for the Russians. The point o the diagram was to show how they got 12sqm for the Su27 and then maybe get an idea on how they count RCS generally.
A figure of 0.3 – 0.4 sq m does not sound right for the F-22. I have been told by someone familiar with the programme that the F-22 is in the same RCS class as the F-117.
What I was aming at is that it is for optimum angles. The Russians count differently than we do in the west.
I personally think it might be a bit high, but at the same time I think the 0,0015-claims för the F35 or 0,0001 for F22 are a bit low in general terms. In some occasions both will probably be true and the rule of scattering tells us that if its optimised for one angle it will look larger from others.
So either these numbers are incorrect, or CAPTOR-E has longer range / F-35 has higher RCS than I assumed.
There are different ways to market the RCS.
Russians go for a more average approach and while th US goes the other way in the marketing. Probably because the US (LM) can achieve lower minimum RCS while the russians can show a smaller difference by going for the average.
Alexander Davidenko: The F22 is in the 0,3-0,4 sqm range.
тогда как у F-22A Raptor она колеблется в диапазоне 0,3-0,4 м².
http://www.inosmi.ru/army/20100313/158588233.html
Either way I think the averages are a better measurement (just think about it as two AWACS 50-100km apart, one of them will get a good reading…).
If Sukhois numbers are somewhat accurate then an Su35 with Iris could track an F22 at over 100nm in a jam free environment.
They also claimed the Su27 to be a 12sqm target. That would be the right side on this diagram with the average frontal RCS.
(Yes, Sukhoi have the competence to judge competitors RCS figures since they have all materials, ll simulation models etc needed to do so. And since the PAK FA is made to counter the F22 they probably have made extensive research about it. So don’t just throw it away because its not from LM Spudman)
Western aligned “light” market – F-16, JAS-39
Isnt the F16 production line closing this year?
Besides, how else could NG quickly update the EODAS units to demonstrate BM, TBM, Ground Fires, etc? The sure did not recompile a whole F-35 block and have it flying in the BAC 1-11.
Maybe they have separated software in the main system?
Do you have anything to support the claim that we are are not talking about imaging processors that come along with all photosensors in digital systems?
It would be highly inefficient to have separate systems just to filter out a <1MP imagestream and then send it for central processing.
You can’t have software without a CPU to drive it 🙂
You can run software without additional CPU-systems. Thats how you use your computer right now. Or did you need another CPU for adding the mouse sensor or visual light sensor (webcam)?
The image sensors need an image processor to translate the sensor info into digital data and often sanitize it digitally. All cameras (digital) have this but its not the CPU.
Aurcov – Each EODAS sensor stares at one-sixth of the universe – 60 x 60 degrees. That’s not far from the FOV of a cellphone camera. The EODAS sensor is about 1MP. Cellphone cams are 5MP. 4MP would equal 2x the linear resolution.
That would mean it has a 1 px per m² at 691 meters assuming the sensors don’t overlap. In theory it could track a jet at twice the distance head on. That of course assuming the following:
6 sensors á 1MP, no overlaping. Sphere surface area = 6MP/6 million sqm.
I think that is a bit too low to actually be accurate. Sensitivity can be increased to improve range but i feel that the system at least should have a 1px per m² resolution at a few kilometers. At 3 km it translates to ~19 MP per camera according to the formula.
EDIT: If we assume that 3 pixels per 10 meters is enough to get any reliable warning on an actual object we get the following distance: <4km. But at that range its very hard to A distinguish targets from clutter and B get a solid track. You want at least 2 solid pixels fully (as in over 50%) covered to have a decent read.
Tu22m , you let yourself go and you end-up going too far . 🙂
I don ‘t wanna quote multiple sentences but you WANT to forget that onboard systems and real sensor fusion is more or less equal to carrying pods with pilot workload . It is wrong my friend ! And you know it ! 😉
Cheers .
Ok, a little far maybe. But the point still remains. Very similar FUNCTIONALITY can already be achieved with systems of today and there are very few real novelties in the very hyped platform.
The biggest difference seem to lie in how the problems have been solved, not the actual performance gained. For instance we have the over hyped 360 degree IRST system.
When a jet is coming from behind they will, with todays tech, be able to identify and track you easily at 90 km while you, if lucky, will detect them at 45 km using similar sensors.
But I’ll happily admit that 360 degree coverage is more than 240 degrees and that 6 sensors are more than 2. I wont admit that it is a revolution. I just dont get the hype. There are more interesting projects that are either being fielded or that are in the makings.
EDIT: One could argue that the Su35S would be superior due to having longer detection ranges from its rear and frontal radars because “its almost 360 degree radar coverage”. Being able to track objects behind the ac is nothing new. Having more than one IR search and track system onboard is nothing new. Being second or third to use beamed datalinks is nothing new etc. However it will be the first LO platform to do all those things unless Pak FA enters service first.
EDIT2: According to a SwAF pilot all photos are from ~5’000 meters or 16’400 feet (approx). This is the level of clarity offered in the already old SPK39 in the declassified images. I still think the EODAS is a big step forward but people tend to forget that the current systems are pretty impressive as well.


 Sign In
Sign In